Deep Learning Kar
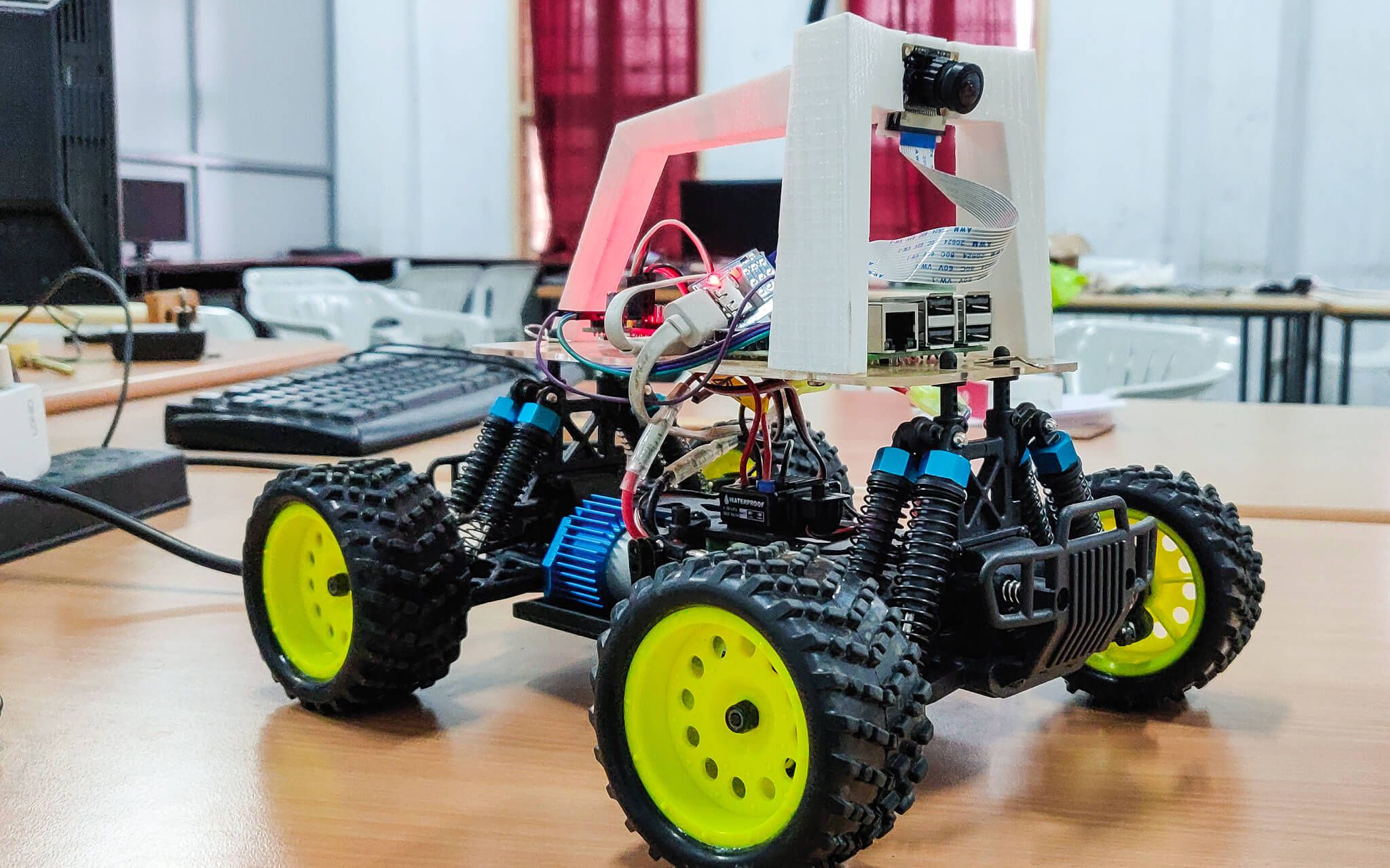
The Donkey autonomous car is a very simple car based on a Raspberry Pi computer where using images and steering angles, car is trained as neural-network autopilot to drive itself around the track.
Project Team members
Keerthana Pulipalupula
Alence Abhinay
A.Lakshmi Patti
B. Sravya
D.Nishilitha
K.Ankitha
K.Nikitha
K.Sai Srujan
Kalyani
Mahesh
Raghu
Sandhya
Shaik Shaimmoon
Sujan
V.Akash
Lakshmi Prasad
Project Details
- DATE: 2019-07-15
- Team : The Kar team
- Domain: Internet of Things, Machine Learning
Project Description
The Internet of things (IoT) is the extension of Internet connectivity into physical devices and everyday objects. Embedded with this functionality and other forms of hardware (such as sensors), these devices can communicate and interact with others over the Internet, and they can be remotely monitored and controlled.The Donkey autonomous car is a very simple car. It's based on a Raspberry Pi computer, a camera, and a servo shield (or hat) board to interface with the R/C car. You drive the vehicle around a lined track to capture images and steering angles, which trains a neural-network autopilot to drive itself around the track. Top speeds around corners are about 4-6mph.While collecting training data, the car itself doesn't do all that much. It basically takes pictures and sends them to an Amazon server and gets servo commands in return. The server is where the magic happens. First it collects the images and driving information from the user manually driving the car around the track. The default way to do this on the Donkey is via the mobile-friendly web page delivered by the server.The mobile web page even has a live video view of what the car sees and a virtual joystick. The server records data from a person driving the car, then uses those images and joystick positions to train a Keras/TensorFlow neural network model in software. This happens quickly on full trip latency (car > server > car) takes about 1/10 second.Once trained, the model can be loaded on the car.This uses a supervised learning technique often referred to as behavioral cloning like HV I/F Library and CAN Library along with HV Controller( which includes velocity control,shift control, communication,mode management, angle control,steer torque control,exception,pedal control,DA/AD ). Next we will be training the Donkey car to drive on it's own based on your driving style!